






Le nouveau robot autonome de collecte de lisier liquide et de fibres courtes
Points forts du GLOUTON
- Efficacité de collecte et de stockage
- Nettoyage et hygiène optimisés
- Autonomie et simplicité d’utilisation
- Navigation autonome et sécurisée
RACLAGE ET COLLECTE DU LISIER
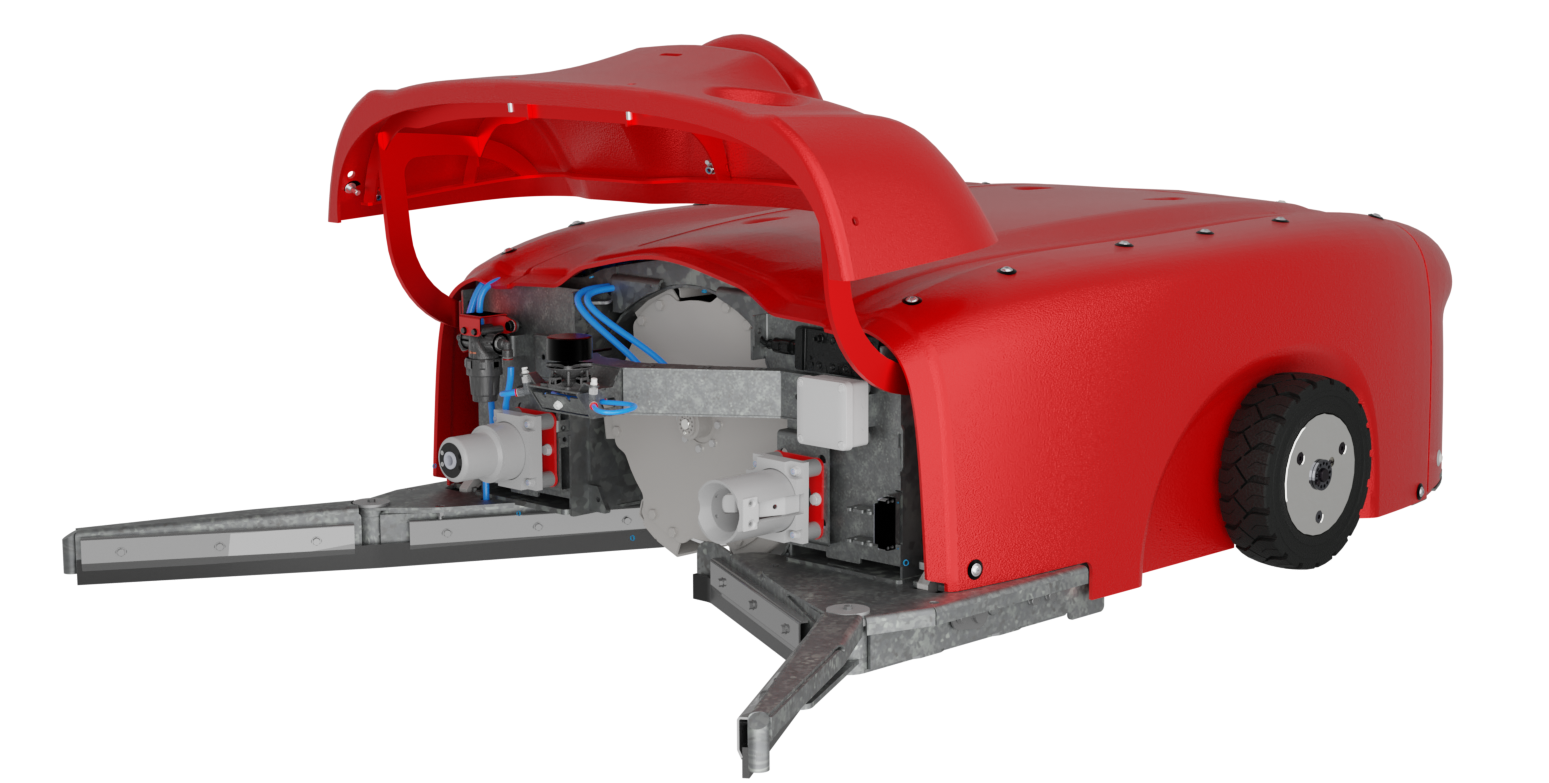
Le Glouton est muni à l’avant d’une étrave de raclage démontable rapidement : en avançant, les volets raclent la surface et concentrent le lisier en position centrale. Une brosse réglable en hauteur assure un nettoyage optimal à l’arrière de cette étrave.
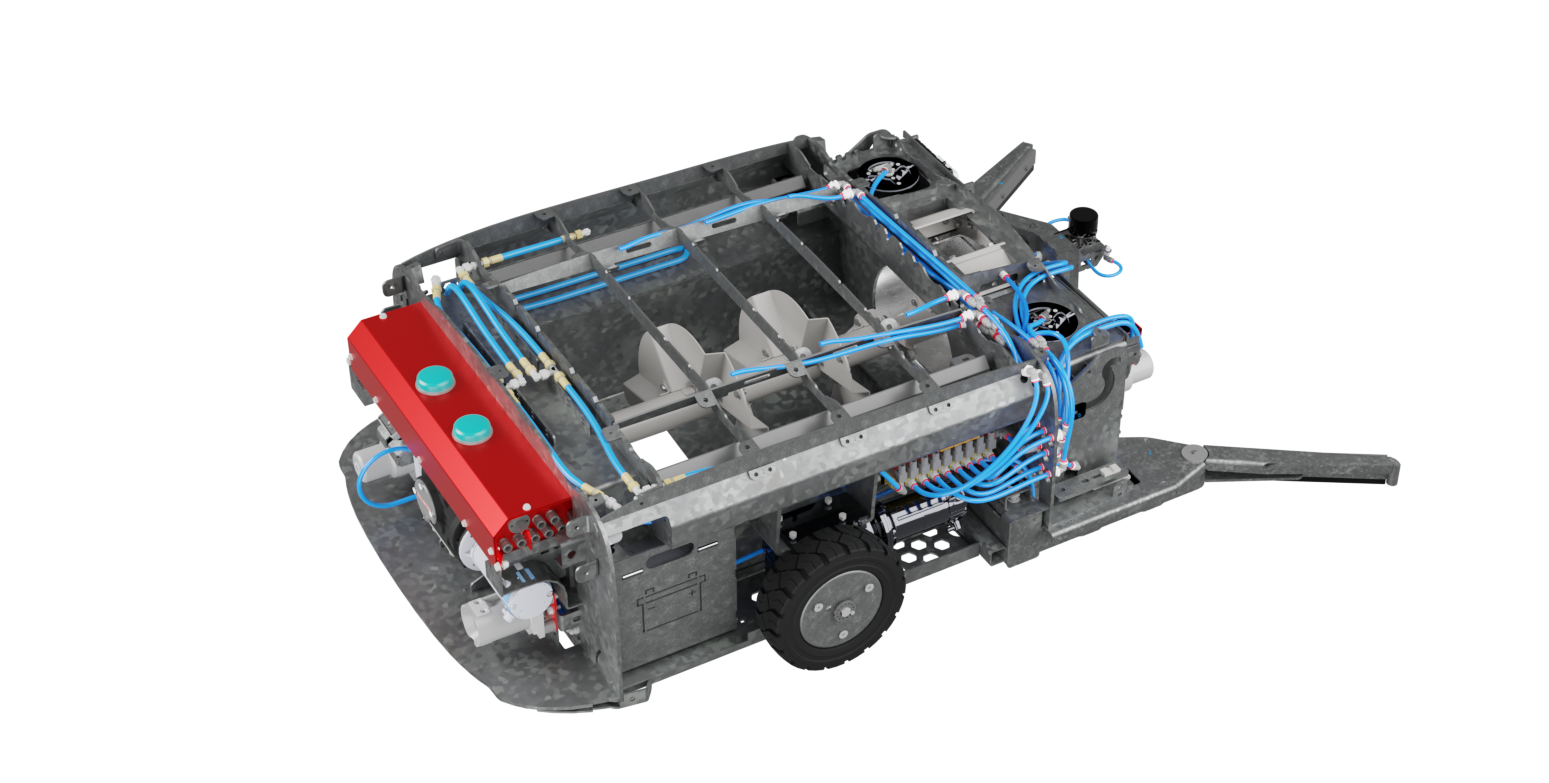
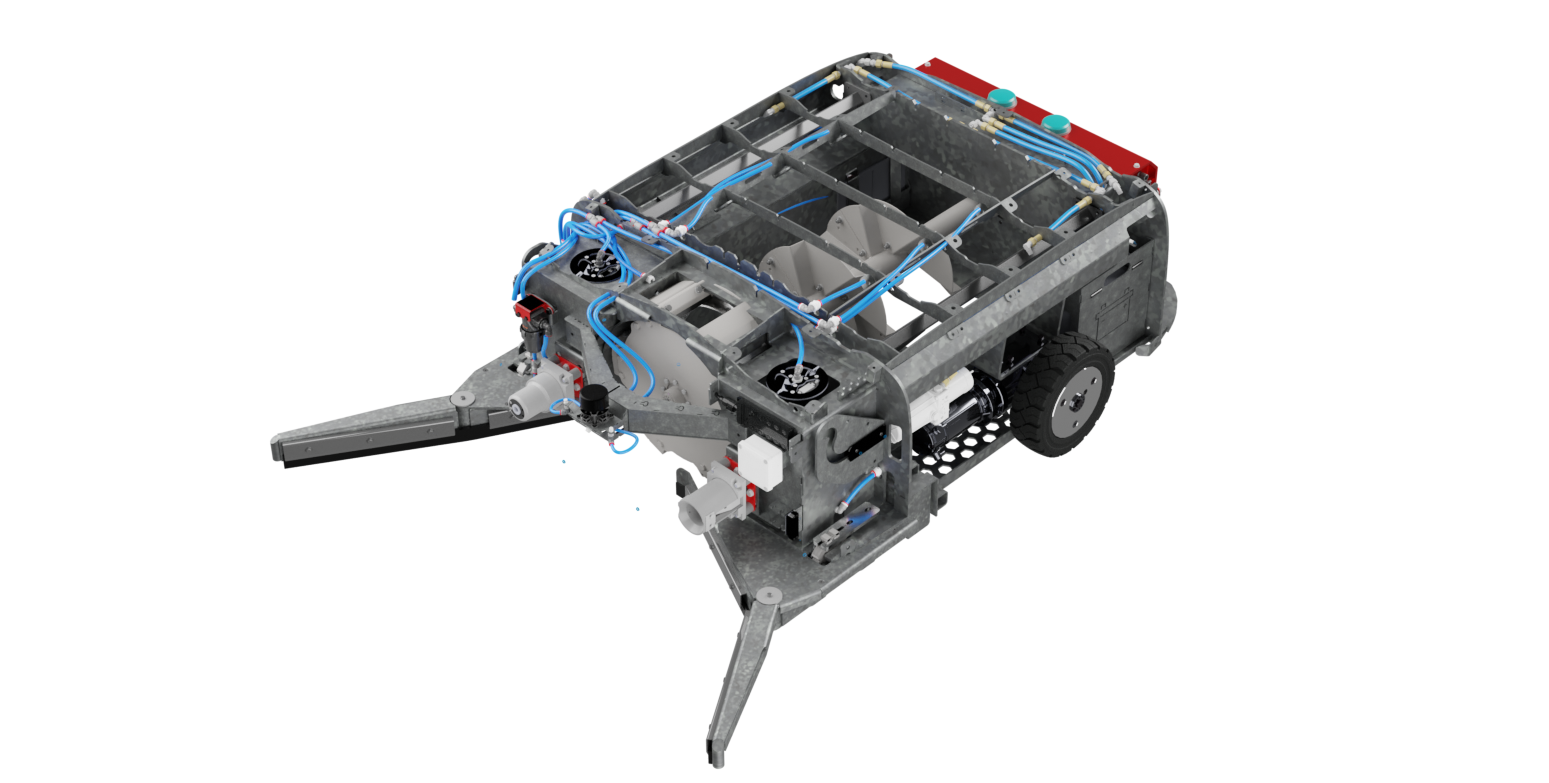
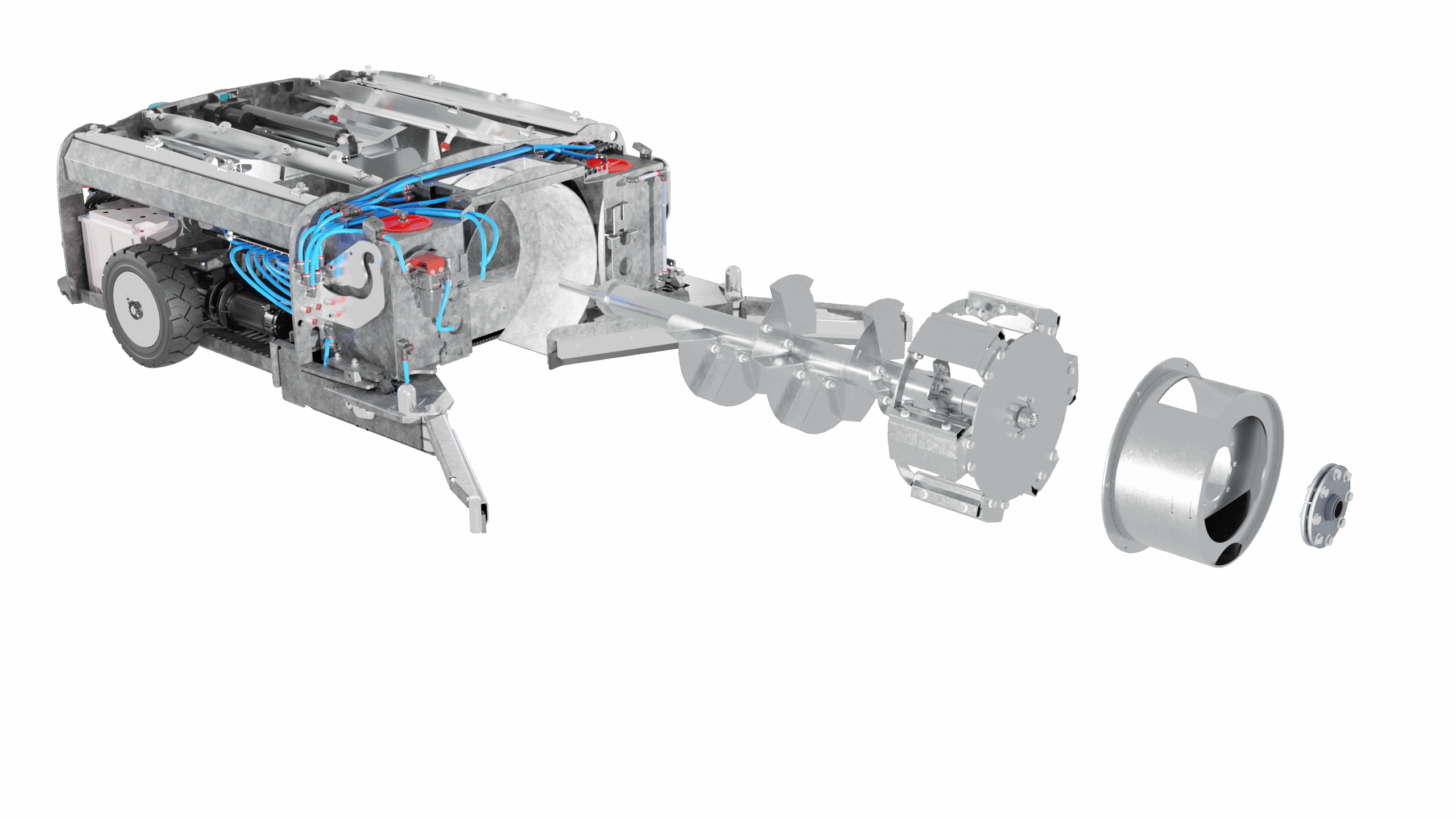
Les godets de la roue de collecte chargent les effluents puis les déversent au niveau avant haut du bac de stockage. Une vis sans fin répartit les effluents collectés de l’avant vers l’arrière du bac de stockage et les brasse. Ce principe mécanique simple met en œuvre uniquement la rotation de l’axe central de collecte et évite tout débordement de la cuve au-delà de sa capacité de stockage. En cas de blocage de la roue de collecte, un cycle de débourrage inverse temporairement le sens de rotation pour dégager les éléments gênants.
ASPERSION
Dans les zones sèches, une aspersion à l’avant de la surface de raclage est possible en activant une buse frontale. D’autres buses d’aspersion sont également utilisées pour le rinçage des deux LIDAR, de la brosse, de la roue de collecte et du bac de stockage.
VIDANGE ET NETTOYAGE
Lorsque le robot accède à une zone de déchargement la trappe de vidange est actionnée. Elle dégage une ouverture sur toute la largeur du bac de stockage. Plusieurs buses sont actionnées sur une courte durée pour nettoyer la roue de collecte, la brosse et l’intérieur du bac de stockage.
L’étrave de raclage est démontable rapidement pour changer les bavettes de raclage des volets, laver et régler la brosse de raclage.
RECHARGE EN EAU ET ELECTRICITE
Le robot se connecte sur une barre de recharge avec une connexion au réseau d’eau d’un côté et de l’autre au chargeur électrique. Les deux batteries sont chargées durant un temps au moins égal au temps de fonctionnement.
NAVIGATION AUTONOME
Les LIDAR avant et arrière, en position haute, permettent le positionnement du robot et la perception globale de l’environnement, dont la présence des animaux parmi lesquels il évolue sans contact. A la mise en route uniquement, un troisième LIDAR temporaire permet de cartographier la partie basse de la zone d’évolution.
Les volets sont équipés de capteurs angulaires pour assurer ensuite un suivi de mur précis et rapide. Les routes à suivre sont ensuite définies sur cette carte : aucun guidage au sol n’est nécessaire. L’appareil suit les différentes séquences de routes en évoluant dans les zones autorisées.
La qualité de la vision est sensible aux salissures : les LIDAR sont nettoyés automatiquement par des buses d’aspersion si leur vision est excessivement masquée. Leur nettoyage périodique est à réaliser manuellement par l’utilisateur.
Une télécommande embarquée permet à tout moment la prise en main manuelle par l’utilisateur.
Deux motoréducteurs à étanchéité renforcée contre l’enroulement de fibres entrainent deux roues caoutchouc pleines, le robot étant en appui à l’avant sur l’étrave de raclage.
Caractéristiques techniques
| Largeur de raclage | 1,80 m |
| Brosse de raclage centrale – Réglable en hauteur | 1,25 m |
| Longueur totale | 2,58 m |
| Largeur du corps (hors roues et volets) | 1,42 m |
| Hauteur depuis le sol | 66 cm |
| Largeur minimum pour demi-tour | 3 m |
| Poids à vide | 1,1 tonne |
| Capacité de stockage du bac de collecte | 400 L |
| Réservoirs d’eau embarqués | 53 L |
| Chargeur industriel | 220 V |
| Batteries gel | 2 x 135 Ah |
| Vitesse de déplacement variable | 2 |
| Motorisation : 2 moteurs à courant continu pilotés par variateur montés sur réducteur à étanchéité renforcée | 2 x 350 W |
| Motorisation de la roue de collecte et da la vis sans fin | 350 W |
| Motorisation de la trappe de vidange | 2 vérins hydrauliques |
| Roues à bandage plein | 2 |
| Navigation LIDAR avant + LIDAR arrière + centrale inertielle + codeurs des moteurs d’avance | Positionnement à 2 cm |
| Installation sans guidage au sol | Mise en place rapide |
| Pilotage par automate industriel | Bus CAN |
| MODEM (avec carte SIM possible, non inclus) | Connecté |
| Télécommande manuelle | Facile à utiliser |